[Operating System - Chapter 3] 프로세스
by Green Frog Developer
이 포스팅은 공룡책으로 알려진 Operating System Concepts의 3장인 Process를 공부하면서 정리한 포스팅이다.
3. 프로세스 (Process)
프로세스 : 실행 중인 프로그램을 말한다. 프로세스는 현대의 컴퓨팅 시스템에서의 작업의 단위이다.
시스템은 사용자 코드를 실행하는 프로세스와 운영체제 코드를 실행하는 프로세스들의 집합이다. 이들 모든 프로세스는 잠재적으로 병행 실행이 가능하고 CPU는 이들 프로세스 가운데서 다중화(multiplex) 된다.
다중화(Multiplex)
여러 프로세스들 사이에서 이들을 처리(?)한다.
3.1 프로세스 개념 (Process Concept)
3.1.1 프로세스 (The Process)
비공식적으로, 프로세스란 실행 중인 프로그램이다. 프로세스의 현재 활동의 상태는 프로그램 카운터(PC) 값과 프로세서 레지스터의 내용으로 나타낸다.
프로세스의 메모리는 아래의 그림과 같이 배치되어 있다.
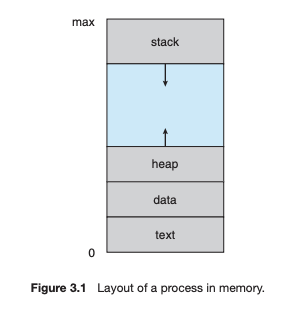
- text : 실행 코드
- data : 전역 변수
- heap : 프로그램 실행 중에 동적으로 할당되는 메모리
- stack : 함수를 호출할 때 임시 데이터 저장장소 (ex. 함수 매개변수, 복귀 주소, 지역변수, …)
stack 및 heap 섹션은 Runtime에 서로의 방향으로 더 커질 수 있음으로 운영체제는 서로 겹치지 않도록 해야 한다.
프로그램(Program)은 명령어 리스트를 내용으로 가진 디스크에 저장된 파일(실행 파일이라고 불림)과 같은 수동적인 존재(passive entity)이다.
프로세스(Process)는 다음에 실행할 명령어를 지정하는 프로그램 카운터(PC)와 관련 자원의 집합을 가진 능동적인 존재(active entity)이다. 실행 파일이 메모리에 적재될 때 프로그램은 프로세스가 된다.
프로세스 자체가 다른 개체를 위한 실행 환경으로 동작할 수 있다는 사실에 주목해야 한다. (ex. JVM)
JVM은 적재된 Java 코드를 해석하고 그 코드를 대신하여 원 기계어를 이용하여 행동을 취하는 프로세스로서 프로그램을 실행한다.
java 명령어는 JVM을 보통의 프로세스처럼 실행시키고, JVM은 Java 프로그램을 가상기계 안에서 실행한다.
3.1.2 프로세스 상태 (Process State)
프로세스는 실행되면서 그 상태가 변한다. 프로세스의 상태는 부분적으로 그 프로세스의 현재의 활동에 따라서 정의된다.
아래의 Status Diagram을 참고해 프로세스의 상태에 대해서 알아보자.

- new : 프로세스가 생성 중이다.
- running : 명령어들이 실행되고 있다.
- waiting : 프로세스가 어떤 이벤트(입출력 완료 또는 신호의 수신 같은)가 일어나기를 기다린다.
- ready : 프로세스가 Processor에 할당되기를 기다린다.
- terminated : 프로세스의 실행이 종료되었다.
어느 한 순간에 한 Processor의 코어에서는 오직 하나의 프로세스만이 실행된다는 것을 인식하는 것이 중요하다. 그렇지만 많은 프로세스가 ready or waiting 상태에 있을 수 있다.
3.1.3 프로세스 제어 블록 (Process Control Block)
각 프로세스는 운영체제에서 프로세스 제어 블록(process control block, PCB)에 의해 표현된다.
아래의 그림은 PCB를 나타내며 이를 통해 PCB에 대해서 알아보자.

- 프로세스 상태 : 프로세스의 상태(new, ready, running, waiting, …)를 나타낸다.
- 프로그램 카운터 : 프로그램 카운터는 이 프로세스가 다음에 실행할 명령어의 주소를 가리킨다.
- CPU 레지스터들 : 레지스터들과 상태 코드에 대한 정보가 포함된다.
- CPU-스케줄링 정보 : 프로세스 우선순위, 스케줄 큐에 대한 포인터와 다른 스케줄 매개변수를 포함한다.
- 메모리 관리 정보 : 운영체제에 의해 사용되는 메모리 시스템에 따라 기준 레지스터와 한계 레지스터의 값, 운영체제가 사용하는 메모리 시스템에 따라 페이지 테이블 또는 세그먼트 테이블 등과 같은 정보를 포함한다.
- 회계 정보 : CPU 사용 시간과 경과된 실시간, 시간 제한, 계정 번호, 잡 또는 프로세스 번호 등을 포함한다.
- 입출력 상태 정보 : 프로세스에 할당된 입출력 장치들과 열린 파일의 목록 등을 포함한다.
요약하면 PCB는 약간의 회계 데이터와 함께 프로세스를 시작시키거나 다시 시작시키는데 필요한 모든 데이터를 위한 저장소의 역할을 한다.
3.1.4 스레드 (Threads)
프로세스의 개념을 확장하여 한 프로세스가 다수의 실행 스레드를 가질 수 있도록 허용한다. 그들은 따라서 프로세스가 한 번에 하나 이상의 일을 수행할 수 있도록 허용한다.
스레드 활용 예시
ex) 다중 스레드 워드 프로세서는 하나의 스레드에 사용자 입력 관리를 맡기는 동안 다른 스레드가 철자 검사기를 수행하도록 만들 수 있다.
3.2 프로세스 스케줄링 (Process Scheduling)
다중 프로그래밍의 목적은 CPU 이용을 최대화하기 위하여 항상 어떤 프로세스가 실행되도록 하는 데 있다.
시분할의 목적은 각 프로그램이 실행되는 동안 사용자가 상호 작용할 수 있도록 프로세스들 사이에서 CPU코어를 빈번하게 교체하는 것이다.
위의 목적을 달성하기 위해 프로세스 스케줄러(Process Scheduler)는 코어에서 실행 가능한 여러 프로세스 중에서 하나의 프로세스를 선택한다. 다중 코어 시스템은 한 번에 여러 프로세스를 실행할 수 있다.
현재 메모리에 있는 프로세스 수를 다중 프로그래밍 정도라고 한다.
3.2.1 스케줄링 큐 (Scheduling Queue)
프로세스가 시스템에 들어가면 준비 큐(Ready Queue)에 들어가서 준비 상태가 되어 CPU 코어에서 실행되기를 기다린다.
I/O 완료와 같은 특정 이벤트가 발생하기를 기다리는 프로세스는 대기 큐(Wait Queue)에 삽입된다.
프로세스 스케줄링의 일반적인 표현은 아래와 같은 큐잉 다이어그램이다.

원은 큐에 서비스를 제공하는 자원을 나타내고 화살표는 시스템의 프로세스의 흐름을 나타낸다. 이 다이어그램을 통해서 말하고 싶은 것은 3가지이다.
- 프로세스가 I/O 요청을 공표한 다음 I/O 대기 큐에 놓일 수 있다.
- 프로세스는 새 자식 프로세스를 만든 다음 자식의 종료를 기다리는 동안 대기 큐에 놓일 수 있다.
- 인터럽트 또는 타임슬라이스가 만료되어 프로세스가 코어에서 강제로 제거되어 준비 큐로 돌아갈 수 있다.
3.2.2 CPU 스케줄링 (CPU Scheduling)
CPU 스케줄러의 역할은 준비 큐에 있는 프로세스 중에서 선택된 하나의 프로세스에 CPU 코어를 할당하는 것이다. CPU 스케줄러는 CPU를 할당하기 위한 새 프로세스를 자주 선택해야 한다.
3.2.3 문맥 교환 (Context Switch)
인터럽트는 운영체제가 CPU 코어를 현재 작업에서 뺏어 내어 커널 루틴을 실행할 수 있게 한다. 이러한 연산은 범용 시스템에서는 자주 발생한다. 인터럽트가 발생하면 시스템은 인터럽트 처리가 끝난 후에 문맥(Context)을 복구할 수 있도록 현재 실행 중인 프로세스의 문맥을 저장할 필요가 있다. 이는 PCB에 저장된다.
문맥(Context)은 CPU 레지스터의 값, 프로세스 상태, 메모리 관리 정보 등을 포함한다.
CPU 코어를 다른 프로세스로 교환하려면 이전의 프로세스의 상태를 보관하고 새로운 프로세스의 보관된 상태를 복구하는 작업이 필요하다. 이 작업은 문맥 교환(context switch)이라고 하고 아래의 그림에 묘사되어 있다.
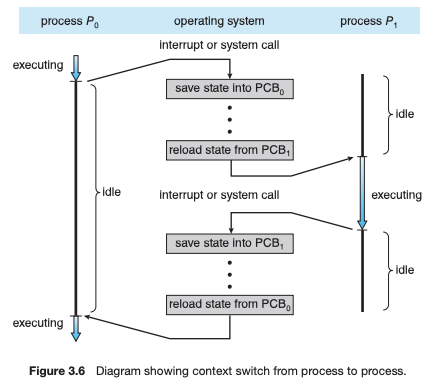
운영체제가 복잡할수록, 문맥 교환 시 해야만 하는 작업의 양이 더 많아진다.
3.3 프로세스에 대한 연산 (Operation on Processes)
대부분 시스템 내의 프로세스들은 병행 실행될 수 있으며, 반드시 동적으로 생성되고, 제거되어야 한다. 그러므로 운영체제는 프로세스 생성 및 종료를 위한 기법을 제공해야 한다.
3.3.1 프로세스 생성 (Process Creation)
프로세스가 실행되는 동안 프로세스는 여러 개의 새로운 프로세스들을 생성할 수 있다.
생성하는 프로세스를 부모 프로세스라고 부르고, 새로운 프로세스는 자식 프로세스라고 부른다. 이 새로운 프로세스들은 각각 다시 다른 프로세스들을 생성할 수 있으며 그 결과 프로세스의 트리(The tree of processes)를 형성한다.
현대 운영체제들은 유일한 프로세스 식별자(pid)를 사용하여 프로세스를 구분하는데 이 식별자는 보통 정수이다.
아래의 그림은 Linux 운영체제의 전형적인 프로세스 트리이다.

언제나 pid가 1인 systemd 프로세스가 모든 사용자 프로세스의 루트 부모 프로세스 역할을 수행하고 시스템이 부트될 때 생성되는 첫 번째 사용자 프로세스이다. 시스템이 부팅되면 systemd프로세스는 다양한 사용자 프로세스를 생성한다.
일반적으로 프로세스가 자식 프로세스를 생성할 때, 그 자식 프로세스는 자신의 임무를 달성하기 위하여 어떤 자원(CPU 시간, 메모리, 파일, 입출력 장치)이 필요하다. 이 자원은 운영체제로부터 직접 얻을 수도 있고, 부모 프로세스가 가진 자원의 부분 집합만을 사용하도록 제한(시스템 과부하 방지)할 수도 있다.
물리적, 논리적 자원을 제공하는 것 이외에 부모 프로세스는 자식 프로세스에 초기화 데이터(입력)를 전달할 수 있다.
프로세스가 새로운 프로세스를 생성할 때, 두 프로세스를 실행시키는 데 두 가지 가능한 방법이 존재한다.
- 부모와 자식은 병행하게 실행을 계속한다.
- 부모는 일부 또는 모든 자식이 실행을 종료할 때까지 기다린다.
새로운 프로세스들의 주소 공간 측면에서 볼 때 다음과 같은 두 가지 가능성이 있다.
- 자식 프로세스는 부모와 똑같은 프로그램과 데이터를 가진다.
- 자식 프로세스가 자신에게 적재될 새로운 프로그램을 가지고 있다.
UNIX 운영체제에서 새로운 프로세스의 생성

- 새로운 프로세스는 fork() 시스템 콜로 생성되고, 원래 프로세스의 주소 공간의 복사본으로 구성된다.
- exec() 시스템 콜은 이진 파일을 메로리로 적재(load)하고 그 프로그램을 실행을 시작한다.
- 원래의 프로그램의 메모리 이미지를 파괴한다.
- 부모 프로세스는 자식 프로세스가 실행되는 동안 할 일이 없으면 자식이 종료될 때까지 준비 큐에서 자신을 제거하기 위해 wait() 시스템 콜을 한다.
Windows 운영체제에서 새로운 프로세스의 생성
- Windows API의 CreateProcess() 함수를 이용하여 새로운 프로세스를 생성한다.
- CreateProcess() API는 자식 프로세스가 생성될 때 주소 공간에 명시된 프로그램을 적재한다. (10개 이상의 매개변수를 요구)
- WaitForSingleObject() 함수는 자식 프로세스의 핸들을 전달받고 이 프로세스가 종료되기를 기다린다.
3.3.2 프로세스 종료 (Process Termination)
프로세스가 마지막 문장의 실행을 끝내고, exit 시스템 콜을 사용하여 운영체제에 자신의 삭제를 요청하면 종료한다. 물리 메모리와 가상 메모리, 열린 파일, 입출력 버퍼를 포함한 프로세스의 모든 자원이 할당 해제되고 운영체제로 반납된다.
다른 방법으로 한 프로세스는 적당한 시스템 콜(ex. TerminateProcess())을 통해서 다른 프로세스의 종료를 유발할 수 있다. 통상적으로 그런 시스템 콜은 단지 종료될 프로세스의 부모만이 호출할 수 있다.
부모 프로세스는 다음과 같이 여러가지 이유로 자식 중 하나의 실행을 종료할 수 있다.
- 자식이 자신에게 할당된 자원을 초과하여 사용할 때
- 자식에게 할당된 태스트가 더이상 필요 없을 때
- 부모가 exit를 하는데, 운영체제는 부모가 exit 한 후에 자식이 실행을 계속하는 것을 허용하지 않는 경우
프로세스가 종료하면 사용하던 자원은 운영체제가 되찾아 간다. 종료되었지만 부모 프로세스가 아직 wait() 호출을 하지 않은 프로세스를 좀비(zombie) 프로세스라고 한다.
부모 프로세스가 wait()을 호출해서 자식 프로세스의 종료를 기다리지 않고 자신을 종료해버린다면 이 상황에 부닥친 자식 프로세스를 고아(orphan) 프로세스라고 한다. UNIX의 경우 고아 프로세스는 init 프로세스(Linux의 systemd와 동일)가 상속하고 종료를 관리한다.
Android 프로세스 계층 (Android Process Hierarchy)
Android는 임의의 프로세스를 종료하지 않고 프로세스의 중요도 계층을 식별했으며, 시스템이 프로세스를 종료하여 새로운 또는 보다 중요한 프로세스를 위한 자원을 확보해야 할 경우 중요도가 낮은 프로세스부터 종료한다
The order of process importance in android
- forground processs
- visible process
- service process
- background process
- empty process
즉, 시스템 자원을 회수해야만 하는 경우 Android는 먼저 empty process -> background process -> … 순서로 종료한다.
3.4 프로세스 간 통신 (Interprocess Communication)
운영체제 내에서 실행되는 병행 프로세스들은 독립적이거나 또는 협력적인 프로세스들 일 수 있다.
프로세스 협력을 허용하는 환경을 제공하는 데는 몇 가지 이유가 있다.
- 정보 공유(information sharing) : 여러 응용 프로그램이 동일한 정보에 흥미를 느낄 수 있으므로, 그러한 정보를 병행적으로 접근할 수 있는 환경을 제공해야 한다.
- 계산 가속화(computation speedup) : 만일 우리가 특정 태스크를 빨리 실행하고자 한다면, 우리는 그것을 서브태스크로 나누어 이들 각각이 다른 서브태스크들과 병렬로 실행되게 해야 한다.
- 모듈성(modularity) : 시스템 기능을 별도의 프로세스들 또는 스레드들로 나누어, 모듈식 형태로 시스템을 구성하기를 원할 수 있다.
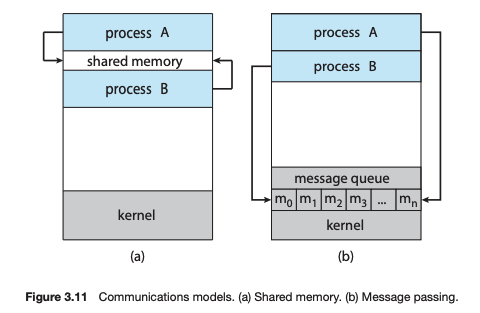
협력적 프로세스들은 데이터를 교환할 수 있는, 즉 서로 데이터를 보내거나 받을 수 있는 프로세스 간 통신(IPC) 기법이 필요하다. 프로세스 간 통신에는 기본적으로 공유 메모리(sharing memory)와 메시지 전달(message passing)의 두 가지 모델이 있다.
- 공유 메모리 모델에서는 협력 프로세스들에 의해 공유되는 메모리의 영역이 구축된다.
- 공유 메모리 영역을 구축할 때만 시스템 콜이 필요하다.
- 메시지 전달 모델에서는 통신이 협력 프로세스들 사이에 교환되는 메시지를 통하여 이루어진다.
- 분산 시스템에서 공유메모리보다 구현하기 쉽다.
메시지 전달 시스템은 통상 시스템 콜을 사용하여 구현되므로 커널 간섭 등의 부가적인 시간 소비 작업이 필요하기 때문에 공유 메모리 모델이 메시지 전달보다 더 빠르다
아래의 그림은 위에 소개된 2가지의 통신 모델(공유 메모리, 메시지 전달)의 그림을 보여준다.
3.5 공유 메모리 시스템에서의 프로세스 간 통신 (IPC in Shared-Memory Systems)
공유 메모리를 사용하는 프로세스 간 통신에서는 통신하는 프로세스들이 공유 메모리 영역을 구축해야 한다.
통상 공유 메모리 영역은 공유 메모리 세그먼트를 생성하는 프로세스의 주소 공간에 위치한다. 이 공유 메모리 세그먼트를 이용하여 통신하고자 하는 다른 프로세스들은 이 세그먼트를 자신의 주소 공간에 추가하여야 한다.
협력하는 프로세스의 개념을 설명하기 위해서, 협력하는 프로세스의 일반적인 패러다임인 생산자-소비자 문제를 생각해 보자. 생산자 프로세스는 정보를 생성하고 소비자 프로세스는 정보를 소비한다. 생산자-소비자 문제의 하나의 해결책은 공유 메모리(buffer)를 사용하는 것이다.
생산자와 소비자가 병행하게 공유 버퍼를 접근하는 상황에 대한 고려 즉, 동기화도 고려해야만 한다. (Locking을 사용할 수 있다.)
3.6 메시지 전달 시스템에서의 프로세스 간 통신 (IPC in Message-Passing Systems)
메시지 전달 방식은 동일한 주소 공간을 공유하지 않고도 프로세스들이 통신을 하고, 그들의 동작을 동기화할 수 있도록 허용하는 기법을 제공한다. 특히 분산된 환경에서 유용하다.
만약 프로세스 P와 Q가 통신을 원하면, 반드시 서로 메시지를 보내고 받아야 한다. 이들 사이에 통신 연결(communication link)이 설정되어야 한다. 이 연결은 다양한 논리적 방법으로 구현할 수 있다.
- 직접 또는 간접 통신
- 동기식 또는 비동기식 통신
- 자동 또는 명시적 버퍼링
3.6.1 명명 (Naming)
통신을 원하는 프로세스들은 서로를 가리킬 방법이 있어야 한다. 이들은 간접 통신 또는 직접 통신을 사용할 수 있다.
직접 통신하에서, 통신을 원하는 각 프로세스는 통신의 수신자 또는 송신자의 이름을 명시해야 한다.
- send(P, message) : 프로세스 P에 메시지를 전송한다.
- receive(Q, message) : 프로세스 Q로부터 메시지를 수신한다.
직접 통신 기법에서 통신 연결은 다음의 특성을 가진다.
- 통신을 원하는 각 프로세스의 쌍들 사이에 연결이 자동으로 구축된다. 프로세스들은 통신하기 위해 상대방의 신원(identity)만 알면 된다.
- 연결은 정확히 두 프로세스 사이에만 연관된다.
- 통신하는 프로세스들의 각 쌍 사이에는 정확히 하나의 연결이 존재해야 한다.
이 기법은 주소 방식에서 대칭성을 보이나, 주소 지정 시에 비대칭을 사용할 수도 있다.
간접 통신에서 메시지들은 메일박스(mailbox) 또는 포트(port)로 송신되고, 그것으로부터 수신된다. 포트는 추상적으로 프로세스들에 의해 메시지들이 넣어지고 메시지들이 제거될 수 있는 객체라고도 볼 수 있다.
각 포트(메일박스)는 고유의 id를 가지고 두 프로세스들이 공유 포트(메일박스)를 가질 때만 이들 프로세스가 통신할 수 있다.
- send(A, message) : 메시지를 메일박스 A로 송신한다.
- receive(A, message) : 메시지를 메일박스 A로부터 수신한다.
간접 통신 방법에서 통신 연결은 다음의 성질을 가진다.
- 한 쌍의 프로세스들 사이의 연결은 이들 프로세스가 공유 메일박스를 가질 때만 구축된다.
- 연결은 두 개 이상의 프로세스들과 연관될 수 있다.
- 통신하고 있는 각 프로세스 사이에는 다수의 서로 다른 연결이 존재할 수 있고, 각 연결은 하나의 메일박스(포트)에 대응된다.
메일박스는 한 프로세스 또는 운영체제에 의해 소유될 수 있다.
3.6.2 동기화 (Synchronization)
프로세스 간의 통신은 send와 receive 프리미티브에 대한 호출에 의해 발생한다. 각 프리미티브를 구현하기 위한 서로 다른 설계 옵션이 있다. 메시지 전달은 봉쇄형(blocking)이거나 비봉쇄형(nonblocking) 방식으로 전달된다.
- blocking send : 송신하는 프로세스는 메시지가 수신 프로세스 또는 메일박스에 의해 수신될 때까지 봉쇄된다.
- nonblocking send : 송신하는 프로세스가 메시지를 보내고 작업을 재시작한다.
- blocking receive : 메시지가 이용 가능할 때까지 수신 프로세스가 봉쇄된다.
- nonblocking receive : 송신하는 프로세스가 유효한 메시지 또는 null을 받는다.
send()와 receive()가 모두 봉쇄형일 때, 우리는 송신자와 수신자 간에 랑데부(rendezvous)를 하게 된다.
3.6.3 버퍼링 (Buffering)
통신이 직접적이든 간접적이든 간에, 통신하는 프로세스에 의해 교환되는 메시지는 임시 큐에 들어 있다.
이러한 큐를 구현하는 방식은 다음과 같다.
- 무 용량(zero capacity) : 큐의 최대 길이가 0이다. 즉, 링크는 자체 안에 대기하는 메시지들을 가질 수 없다. 이 경우에,송신자는 메시지를 수신할 때까지 기다려야 한다.
- 유한 용량(bounded capacity) : 큐는 유한한 길이 n을 가진다. 즉, 최대 n개의 메시지가 그 안에 들어 있을 수 있다. 큐가 가득 차면 봉쇄된다.
- 무한 용량(unbounded capacity) : 큐는 잠재적으로 무한한 길이를 가진다. 따라서 메시지들이 얼마든지 큐 안에서 대기할 수 있다. 송신자는 절대 봉쇄되지 않는다.
3.7 IPC 시스템의 사례 (Examples of IPC Systems)
네 가지 다른 IPC 시스템을 탐구해 보자.
3.7.1 POSIX 공유 메모리 (POSIX Shared Memory)
POSIX 공유 메모리는 memory-mapped 파일을 사용하여 구현된다. memory-mapped 파일은 공유 메모리의 특정 영역을 파일과 연관시킨다.
- 프로세스는
fd = shm_open(name, O_CREAT | O_RDWR, 0666)와 같이 시스템 콜을 사용하여 공유 메모리 객체를 생성한다. ftruncate(fd, SIZE)와 같은 함수를 사용하여 공유 메모리 객체의 크기를 바이트 단위로 설정한다.ptr = (char *)mmap(0, SIZE, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0)와 같은 함수를 사용하여 공유 메모리 객체를 포함하는 memory-mapped 파일을 구축한다.
3.7.2 Mach 메시지 전달 (Mach Message Passing)
모든 태스크 간 통신을 포함하여 Mach에서 대부분의 통신은 메시지(Message)로 수행된다. Mach에서 포트(port)라고 하는 메일박스로 메시지를 주고 받는다. 포트는 크기가 정해져 있고 단방향이다. 양방향 통신의 경우 메시지가 한 포트로 전송되고 응답이 별도의 응답 포트로 전송된다.
각 포트에는 여러 송신자가 있을 수 있지만 수신자는 오직 하나만 존재한다.
태스크가 생성되면 Task Self 포트와 Notify 포트라는 두 개의 특별한 포트도 생성된다.
- 커널은 Task Self 포트에 대한 수신 권한을 가지고 있어 태스크가 커널에 메시지를 보낼 수 있다.
- 커널의 이벤트 발생 알림을 작업의 Notify 포트로 보낼 수 있다.
mach_port_allocate() API는 새 포트를 작성하고 메시지 큐를 위한 공간을 할당한다. 또한 포트에 대한 권한을 식별한다.
각 태스크는 또한 부트스트랩 포트에 액세스 할 수 있어서 태스크가 생성한 포트를 시스템 전체의 부트스트랩 서버에 등록할 수 있다. 포트가 부트스트랩 서버에 등록되면 다른 태스크가 이 레지스트리에서 포트를 검색하여 포트로 메시지를 보낼 수 있는 권한을 얻을 수 있다.
mach_msg() 함수는 메시지를 보내고 받는 표준 API이다. mach_msg()가 호출되면 이는 mach_msg_trap() 함수를 호출하고 mach_msg_trap()은 mach_msg_overwrite_trap()함수를 호출하여 메시지의 실제 전달을 처리한다.
포트(메일박스)가 가득 찼을 경우 mach_msg()에서 설정할 수 있는 옵션
- 큐에 공간이 생길 때까지 무기한 기다린다.
- 최대 n 밀리초 동안 기다린다.
- 기다리지 말고 즉시 복귀한다.
- 메시지를 일시적으로 캐시 한다. 메시지가 전송되는 큐가 가득 차더라도 운영체제에 전달하여 보존한다.
메시지 시스템의 주요 문제점은 일반적으로 송신자의 포트에서 수신자의 포트로 메시지를 복사해야 하므로 발생하는 성능 저하이다.(가상 메모리 관리 기술을 사용하면 같은 시스템 내의 메시지 전송간에 성능 저하를 최소화 할 수 있다.)
3.7.3 Windows
Windows는 다중 운영 환경 또는 서브시스템을 지원하며, Application은 메시지 전달(Message Passing) 기법을 통해 이들과 통신한다. 따라서 응용 프로그램은 서브시스템 서버의 클라이언트로 간주할 수 있다.
Windows의 메시지 전달 설비는 고급 로컬 프로시저 호출 설비(advanced local procedure call facility, ALPC)라 불린다. ALPC는 동일 기계상에 있는 두 프로세스간의 통신에 사용한다. 원격 프로시저 호출(RPC) 기법과 같으나, Windows에 맞게 특별히 최적화 되었다.
Windows는 두 프로세스 간에 연결을 구축하고 유지하기 위해 포트 객체를 사용한다. Windows는 연결 포트(Connection port)와 통신 포트(communication port)의 두 가지 유형의 포트를 사용한다.
다음은 Windows의 ALPC 과정의 그림이다.
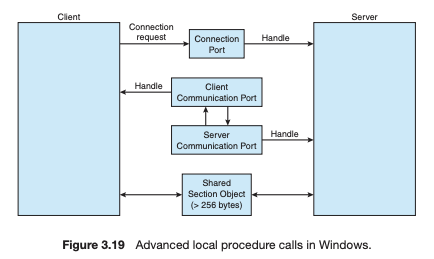
ALPC 채널이 생성되면 다음 3가지 중 하나의 메시지 전달 기법의 하나가 선택된다.
- 256바이트까지의 작은 메시지의 경우, 포트의 메시지 큐가 중간 저장소로 사용되고, 메시지는 프로세스에서 프로세스로 복사된다.
- 대용량 메시지는 반드시 섹션 객체(Section Object)를 통하여 전달되어야 한다. 섹션 객체란 채널과 연관된 공유 메모리의 영역을 말한다.
- 데이터의 양이 너무 많아서 섹션 객체에 저장될 수 없는 경우, 서버 프로세스가 클라이언트의 주소 공간을 직접 읽거나 쓸 수 있는 API를 사용할 수 있다.
클라이언트는 채널을 설정할 때 메시지 전달 기법을 설정해야만 한다. (즉, 대용량 메시지 전송의 필요 여부)
Windows의 ALPC는 Windows API의 부분이 아니기 때문에 응용 프로그래머는 사용할 수 없다. Windows API를 사용하는 어플리케이션은 RPC(Remote Procedure Calls)를 부르고, 같은 시스템 상에 존재하는 프로세스의 경우 RPC가 호출되면 이 RPC는 간접적으로 ALPC를 호출하여 처리된다.
3.7.4 파이프 (Pipes)
파이프는 두 프로세스가 통신할 수 있게 하는 전달자로서 동작한다. 파이프는 초기 UNIX 시스템에서 제공하는 IPC 기법의 하나였다.
3.7.4.1 일반 파이프 (Ordinary Pipes)
일반 파이프는 생산자-소비자 형태로 두 프로세스 간에 통신을 허용한다. 생산자는 파이프의 한 종단(쓰기 종단)에 쓰고, 소비자는 다른 종단(읽기 종단)에서 읽는다.
결과적으로 일반 파이프는 한쪽으로만 데이터를 전송할 수 있으며 오직 단방향 통신만을 가능하게 한다. 양방향 통신이 필요하다면 각각 다른 방향으로 데이터를 전송할 수 있는 두 개의 파이프를 사용해야 한다.
일반 파이프는 파이프를 생성한 프로세스 이외에는 접근할 수 없다. 따라서 통상 부모 프로세스가 파이프를 생성하고 fork()로 생성한 자식 프로세스와 통신하기 위해 사용한다.
다음의 그림은 일반 파이프를 위한 파일 디스크립터를 나타낸 그림이다.
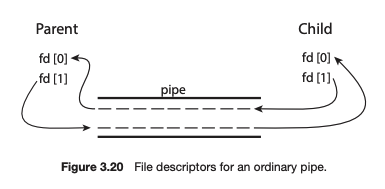
fd 배열은 파일 디스크립터와 부모 및 자식 프로세스의 관계를 보여준다. 이 그림에서 보듯이 부모가 파이프의 쓰기 종단(fd[1])에 데이터를 쓰면 파이프의 읽기 종단(fd[0])에서 자식이 읽을 수 있다.
Windows 시스템은 일반 파이프를 익명 파이프(anonymous pipe)라고 부른다. UNIX와 Windows 시스템 모두에서 통신하는 두 프로세스는 부모-자식 관계를 가져야 한다는 것을 꼭 명심하라!! 이 유형의 파이프는 동일한 기계상의 두 프로세스끼리만 통신이 가능하다는 것을 의미한다.
3.7.4.2 지명 파이프 (Named Pipes)
지명 파이프(Named Pipes)는 양방향으로 통신이 가능하며 부모-자식 관계도 필요로 하지 않는다. Named Pipes가 구축되면 여러 프로세스들이 이를 사용하여 통신할 수 있다.
통신 프로세스가 종료하더라도 지명 파이프는 계속 존재한다. UNIX와 Windows 시스템은 구현상에 차이점은 있지만 모두 지명 파이프를 지원한다.
UNIX에서 지명 파이프는 FIFO라고 부른다. 생성되면 지명 파이프는 파일 시스템의 보통 파일처럼 존재한다. 시스템 콜로 생성 및 조작되며 명시적으로 파일 시스템에서 삭제될 때까지 존재한다. FIFO는 반이중 전송만이 가능하다. 서로 다른 기계에 존재하는 프로세스 사이에 통신이 필요하다면 소켓을 사용해야 한다.
반이중 통신 : 양방향으로 데이터가 전송될 수는 있으나 양쪽에서 동시에 전송하는 것은 불가능한 방식
전이중 통신 : 양쪽에서 동시에 데이터를 전송할 수 있는 방식
Windows 시스템의 지명 파이프는 전이중 통신을 허용하며, 통신하는 두 프로세스는 같은 기계 또는 다른 기계상에 존재할 수 있다. 또한 Windows 시스템은 바이트-단위 또는 메시지-단위 데이터의 전송을 허용한다.
실제 파이프 사용 예시 in UNIX
파이프는 UNIX 명령어 라인 환경에서 한 명령의 출력이 다른 명령의 입력으로 사용되는 상황에서 자주 사용된다. 파이프는 명령어 라인에서 | 문자를 사용하여 구축될 수 있다.
ex) ls | less이 시나리오에서 ls 명령은 생산자 역할을 하며 출력은 less 명령에 의해 소비된다.
Dos Shell도 파이프를 구축하기 위하여 | 문자를 사용한다.
ex) dir | more
3.8 클라이언트 서버 환경에서 통신 (Communication in Client-Server Systems)
클라이언트 서버에서 사용할 수 있는 두 가지 다른 통신 전략(Socket, RPC)에 대해서 설명하도록 하겠다.
3.8.1 소켓 (Socket)
소켓(socket)은 통신의 극점(endpoint)을 뜻한다. 두 프로세스가 네트워크상에서 통신을 하려면 양 프로세스마다 하나씩, 총 두 개의 소켓이 필요하다. 각 소켓은 IP 주소와 포트 번호 두가지를 접합(concatenate)해서 구별한다.
클라이언트 프로세스가 연결을 요청하면 호스트 컴퓨터가 포트 번호를 부여한다. 이 번호는 1024보다 큰 임의의 정수가 된다.
아래의 그림을 통해서 알아보자.
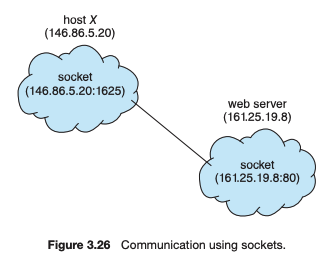
두 호스트 사이에 패킷들이 오갈 때 그 패킷들은 이 목적지 포트 번호가 지정하는 데 따라 적절한 프로세스로 배달된다.
모든 연결은 유일한 소켓 쌍으로 구성되어야 한다!!
책에는 Java를 사용한 Socket 프로그래밍 예제가 아주 잘 나와 있음으로 이를 참고해 보자!!
소켓을 이용한 통신은 분산된 프로세스 간에 널리 사용되고 효율적이기는 하나 스레드 간에 구조화되지 않은 바이트 스트림만을 통신하도록 하기 때문에 너무 낮은 수준이다. 이 바이트 스트림의 해석은 오롯이 클라이언트와 서버의 책임이 되기 때문에 더 높은 수준의 소켓 기반 통신을 사용해 보자.
3.8.2 원격 프로시저 호출 (Remote Procedure Calls, RPC)
원격 서비스와 관련한 가장 보편적인 형태 중 하나는 RPC 패러다임으로서, 네트워크에 연결된 두 시스템 사이의 통신에 사용하기 위하여 프로시저 호출 기법을 추상화하는 방법으로 설계되었다.
원격 프로시저 호출(RPC) (From Wiki)
별도의 원격 제어를 위한 코딩 없이 다른 주소 공간에서 함수나 프로시저를 실행할 수 있게하는 프로세스 간 통신 기술이다. 다시 말해, 원격 프로시저 호출을 이용하면 프로그래머는 함수가 실행 프로그램에 로컬 위치에 있든 원격 위치에 있든 동일한 코드를 이용할 수 있다.
RPC에서는 프로세스들이 서로 다른 시스템 위에서 돌아가기 때문에 원격 서비스를 제공하기 위해서는 메시지 기반 통신을 해야 한다.
RPC 통신에서 전달되는 메시지는 구조화 되어 있고, 데이터 패킷 수준을 넘어선다. 각 메시지에는 원격지 포트에서 listen 중인 RPC 디먼의 주소가 지정되어 있고 실행되어야 할 함수의 식별자, 그리고 그 함수에게 전달되어야 할 매개변수가 포함된다. 그런 후에 요청된 함수가 실행되고 어떤 출력이든지 별도의 메시지를 통해 요청자에게 반환된다.
데몬(디먼, Daemon)
멀티태스킹 운영 체제에서 데몬(daemon, 발음: 데이먼/’deɪmən/ 또는 디먼 /’dimən/[1])은 사용자가 직접적으로 제어하지 않고, 백그라운드에서 돌면서 여러 작업을 하는 프로그램을 말한다. 시스템 로그를 남기는 syslogd처럼 보통 데몬을 뜻하는 ‘d’를 이름 끝에 달고 있으며, 일반적으로 프로세스로 실행된다.
데몬은 대개 부모 프로세스를 갖지 않으며, 즉 PPID가 1이며, 따라서 프로세스 트리에서 init 바로 아래에 위치한다. 데몬이 되는 방법은 일반적으로 자식 프로세스를 포크(fork)하여 생성하고 자식을 분기한 자신을 죽이면서 init이 고아가 된 자식 프로세스를 자기 밑으로 데려가도록 하는 방식이다. 이러한 방법을 ‘fork off and die’라 부르기도 한다.
원격 프로세스가 어떤 서비스를 받고자 하면 그 서비스에 대응되는 RPC 디먼이 listen하고 있는 포트 주소로 메시지를 보내야 한다. (보통 이를 도와주기 위해 matchmaker가 존재한다.)
matchmaker : 클라이언트가 원하는 RPC Daemon의 포트번호를 알려주는 랑데부용 디먼이다.
RPC는 클라이언트가 원격 호스트의 프로시저 호출하는 것을 마치 자기의 프로시저 호출하는 것처럼 해준다. RPC 시스템은 클라이언트 쪽에 스텁을 제공하여 통신을 하는데 필요한 자세한 사항들을 숨겨준다.
클라이언트 측에서는 서버에게 데이터를 보내기 전 매개변수 정돈 작업의 일환으로 전송할 데이터를 기종 중립적인 XDR 형태로 바꾸어서 보낸다.
RPC는 분산 파일 시스템(distributed file system, DFS)을 구현하는 데 유용하다. DFS는 몇 개의 RPC daemon과 클라이언트로 구현할 수 있다.
아래의 그림은 RPC의 실행을 나타낸다.

3.8.2.1 Android RPC
Android 운영체제는 바인더 프레임워크에 포함된 풍부한 IPC기법의 집합을 가지고 있는데, 이 중 RPC는 프로세스가 다른 프로세스의 서비스를 요청할 수 있게 한다.
Android 응용 프로그램 구성요소 중 하나는 사용자 인터페이스가 없지만 백그라운드로 실행되며 장기 실행 연산을 실행하거나 원격 프로세스에 대한 작업을 수행하는 서비스이다.
이 서비스를 이용해 백그라운드에서 음악을 재생하고 다른 프로세스 대신 네트워크 연결을 통해 데이터를 검색하여 데이터를 다운로드 할 때 다른 프로세스가 실행 중단되는 것을 방지할 수 있다.
여기까지 3장 Process에 대한 정리는 마치도록 하고 다음에는 4장 Threads & Concurrency로 돌아오도록 하겠다. Coming Soon~
Subscribe via RSS